


Bodenanäherungssensor für Dein Flugzeug
Wer schon mal einen Jet geflogen hat weiss wie wertvoll die Bodenanährungsansagen für eine gelungene Landung sind. Diese sind an den Radarhöhenmesser gekoppelt und werden in gewissen Höhen vorgesagt.. Meistens kommt der Callout 400, 300, 200, 100, 50, 40, 30, 20 und wenn es perfekt läuft dann kommt der 3er Callout. Die vorgesagten Zahlen geben die Höhe in Fuss über Grund an. Anhand der Geschwindigkeit der ausgerufenen Höhen kann man abschätzen wie schnell sich der Flieger dem Boden nähert - man landet das Flugzeug also eigentlich mit den Ohren...
Schon lange hatte ich die Idee so ein System für die Kleinfliegerei zu entwickeln. Vor 6 Jahren habe ich damit angefangen und weil es nicht funktioniert hat habe ich es in meiner Projektbibliothek nach hinten verschoben. Jetzt, da die meisten Flugzeuge wegen Corona am Boden stehen habe ich endlich Zeit dieses Projekt weiter zu verfolgen.
Kurzer Sensorüberblick
1. Ultraschall Distanzsensor
der erste Versuch vor 6 Jahren war mit einem Ultraschall Distanzsensor. Das hat überhaupt nicht
funktioniert. Der Sensor hat schon in in der Luft angesprochen und war somit nutzlos. Den Weg habe ich dann auch nicht weiter verfolgt.

2. Laser Distanzsensor:
der nächste Schritt war einen Laser Distanzsensor zu kaufen. Vor ungefähr 6 Jahren kam der
Lidar Lite Version 1 auf den Markt und den habe ich für ungefähr 80 Euro gekauft. Mittlerweile gibt es Version 3. Ich habe meine aktuellen Tests jedoch mit Version 1 durchgeführt. Der Lidar Lite hat einenMessbereich bis 40 m.

3. Infrarot Distanzsensor:
um einen Vergleich zum Lasersensor zu haben wurde noch ein aktueller Sensor von der Firma Benewake
angeschafft. Der TF Mini Plus. Der Sensor hat einen Messbereich bis 12 m.

Die weiteren Komponenten der Steuerung
Das ganze wird von einem Arduino UNO gesteuert. Um die größe klein zu halten habe ich mich für den ELEGOO Nano V3 entschieden. Kostenpunkt für den Computer 7 Euro.
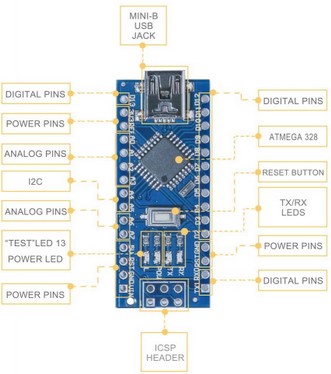
ELEGOO Nano V3 Entwicklerboard mit Atmega328P CH340 Chip
Für die Tonausgabe wurde ein Modul von Adafruit gewählt. Das Modul kann bis zu 11 separate Töne
abspielen. Die Töne werden durch Pins getriggert - somit ist die Programmierung denkbar einfach...
Der Adafruit kostet um die 25 Euro.
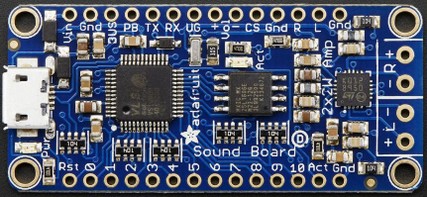
Adafruit Audio FX Sound Board + 2x2W Amp - WAV/OGG Trigger - 2MBAls Display habe ich ein kleines längliches 0.91 Zoll von Waveshare ausgewählt. Das passt perfekt unter mein Dashboard und ist mit weisser Schrift gut lesbar. Kostenpunkt 7 Euro.Waveshare 128x32, General 0.91inch OLED display Module

Jetzt müssen die Komponenten nur noch zusammengebaut werden...
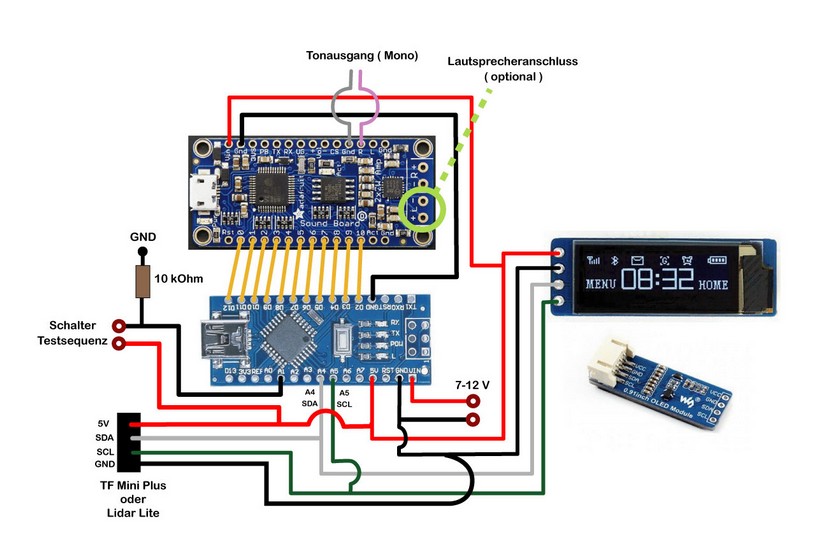
Adafruit Modul
Das Steuerpins 0 bis 10 werden mit den I/O Pins des Arduinos D2 - D12 verbunden. Der Kopfhörerausgang wird in Mono angesprochen und benutzt den Pin R. Dadurch kann an den linken Verstärker optional ein Lautsprecher angeschlossen werden.
Display
Das Display wird über den I2C Bus mit dem Arduino verbunden.
Distanzmesser
Der jeweilige Distanzmesser wird auch über den I2C Bus mit dem Arduino verbunden.
Werksmäßig ist der TFMini Plus auf den UART Modus eingestellt. Dieser muss noch in den I2C Modus umgestellt werden
siehe Blog Umstellung TFMini Plus von UART auf I2C
Taster
An Pin A1 des Arduinos habe ich einen Taster gelegt, mit dem man eine Testsequenz ausgeben kann. Alle gespeicherten Töne werden wiedergegeben. Das ist hilfreich wenn man das System am Boden testen möchte.
Das ganze sieht dann verkabelt so aus:
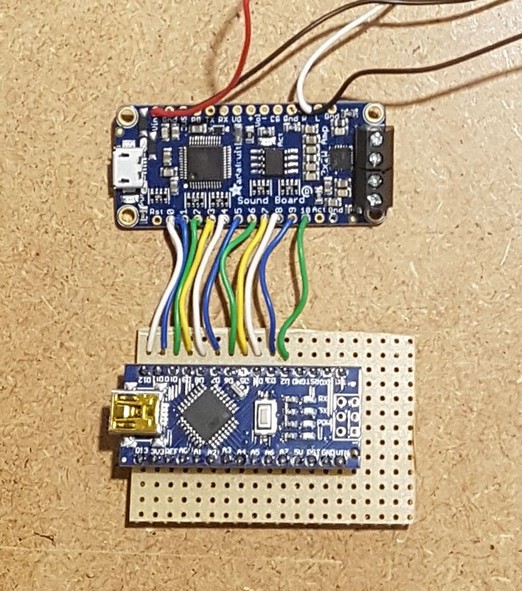

Verbindung vom Adafruit zum Arduino
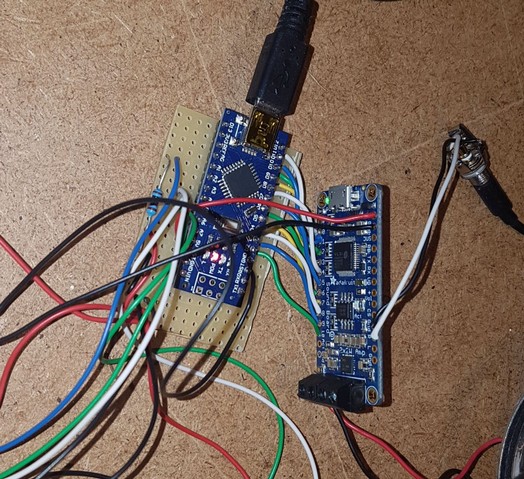
Ansicht mit Tasteranschluss und I2C Verkabelung
Für die Sensoren habe ich jeweils eine an mein Flugzeug angepasste Halteplatte ausgefräst. Diese
Halteplatte wird in einen vorhandenen Auschnitt am Flugzeugbauch eingebaut.


Ansicht der Sensoren in der Halteplatte. Die I2C Leitung ist via DSub Stecker
mit dem Arduino verbunden

Einbau des Lidar Lite Sensors

Einbau des TF Mini Plus Sensors

Gesamtübersicht der Komponenten
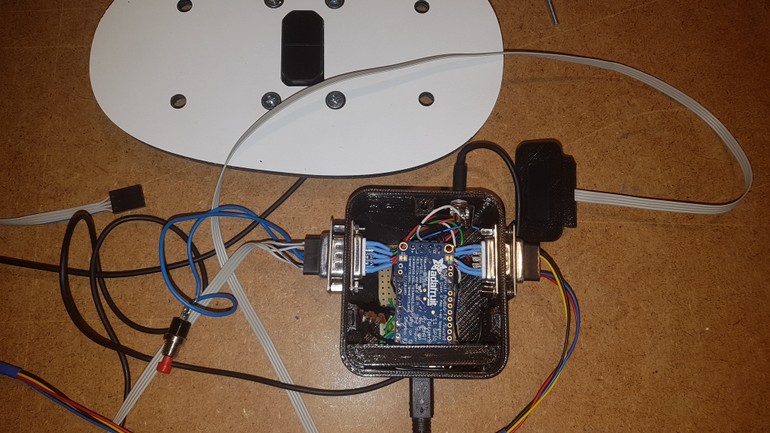
Das ganze dann noch in einer Box verbaut

Deckel zu und ab zum Flugtest
Flugtest
Der Flugtest wurde mit einer Speed Canard durchgeführt. Die Anfluggeschwindigkeit beträgt bei der der
Speed Canard 80 kts.
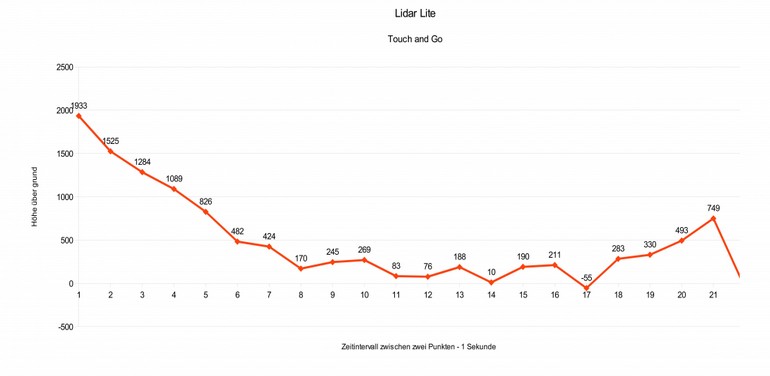
Messung Lidar Lite
Mir fiel schon am Boden auf, dass die Messwerte beim Lidar Lite teilweise stark variierten. Dies zeigte sich
auch in der Flugmessung. Beim Touch and Go haben sich falsche Messwerte hineingeschlichen. Das
Zeitintervall zwischen zwei Messungen betrug 1 Sekunde - das war viel zu groß. Mehr Messwerte sind für
nötig um den Landeprozess abzubilden.
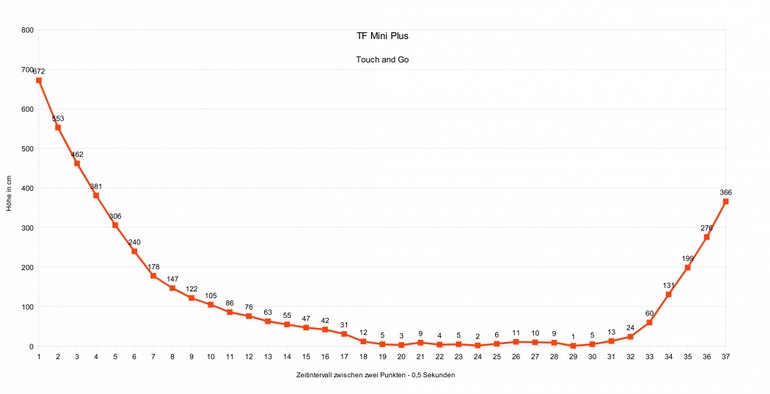
Messung TF Mini Plus
Beim TF Mini Plus sah es schon wesentlich besser aus. Am Boden variierte er nur wenig, so um die 4 cm,
also gut im akzeptablem Bereich. Diesmal wurde als Zeitintervall für die Messung 0,5 Sekunden gewählt.
Die Messwerte waren sehr brauchbar aber das Zeitintervall war immer noch zu groß. Es gab keine Fehlmessung und der Computer hat schön die Höhe heruntergesprochen. Es waren nur wieder zu wenig Messwerte...
So eine Landung ist schon ziemlich dynamisch.
Dateien
Hier sind alle Dateien für das Projekt zusammengestellt:
Libraries für den Arduino
Dateien entpacken und in den Libraries Ordner des Arduinoverzeichnisses verschieben
Tondateien
Die Tondateien sind schon im Leseformat des Adafruit Tonmoduls.
Bsp.:Die Datei T04 wird gespielt wenn der Pin 4 des Adafruits auf LOW gesetzt wird.
Arduino Sketches
genau so ein Gerät suche ich.
Wären Sie bereit, ein Gerät mit einem TF Mini Plus Sensor zu bauen und zu verkaufen?
Vielen Dank
Jirka
VG Tom 0157 86875082